
Publications
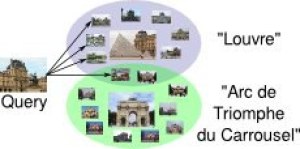
Visual landmark recognition from Internet photo collections: A large-scale evaluation
In this paper, we present an object-centric, fixeddimensional 3D shape representation for robust matching of partially observed object shapes, which is an important component for object categorization from 3D data. A main problem when working with RGB-D data from stereo, Kinect, or laser sensors is that the 3D information is typically quite noisy. For that reason, we accumulate shape information over time and register it in a common reference frame. Matching the resulting shapes requires a strategy for dealing with partial observations. We therefore investigate several distance functions and kernels that implement different such strategies and compare their matching performance in quantitative experiments. We show that the resulting representation achieves good results for a large variety of vision tasks, such as multi-class classification, person orientation estimation, and articulated body pose estimation, where robust 3D shape matching is essential.
Biternion Nets: Continuous Head Pose Regression from Discrete Training Labels

TL;DR: By doing the obvious thing of encoding an angle φ as (cos φ, sin φ), we can do cool things and simplify data labeling requirements.
While head pose estimation has been studied for some time, continuous head pose estimation is still an open problem. Most approaches either cannot deal with the periodicity of angular data or require very fine-grained regression labels. We introduce biternion nets, a CNN-based approach that can be trained on very coarse regression labels and still estimate fully continuous 360° head poses. We show state-of-the-art results on several publicly available datasets. Finally, we demonstrate how easy it is to record and annotate a new dataset with coarse orientation labels in order to obtain continuous head pose estimates using our biternion nets.
» Show BibTeX
@inproceedings{Beyer2015BiternionNets,
author = {Lucas Beyer and Alexander Hermans and Bastian Leibe},
title = {Biternion Nets: Continuous Head Pose Regression from Discrete Training Labels},
booktitle = {Pattern Recognition},
publisher = {Springer},
series = {Lecture Notes in Computer Science},
volume = {9358},
pages = {157-168},
year = {2015},
isbn = {978-3-319-24946-9},
doi = {10.1007/978-3-319-24947-6_13},
ee = {http://lucasb.eyer.be/academic/biternions/biternions_gcpr15.pdf},
}
A Fixed-Dimensional 3D Shape Representation for Matching Partially Observed Objects in Street Scenes
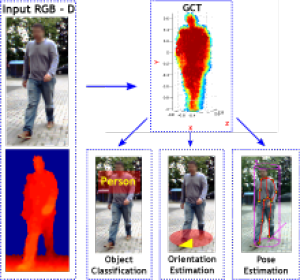
In this paper, we present an object-centric, fixeddimensional 3D shape representation for robust matching of partially observed object shapes, which is an important component for object categorization from 3D data. A main problem when working with RGB-D data from stereo, Kinect, or laser sensors is that the 3D information is typically quite noisy. For that reason, we accumulate shape information over time and register it in a common reference frame. Matching the resulting shapes requires a strategy for dealing with partial observations. We therefore investigate several distance functions and kernels that implement different such strategies and compare their matching performance in quantitative experiments. We show that the resulting representation achieves good results for a large variety of vision tasks, such as multi-class classification, person orientation estimation, and articulated body pose estimation, where robust 3D shape matching is essential.
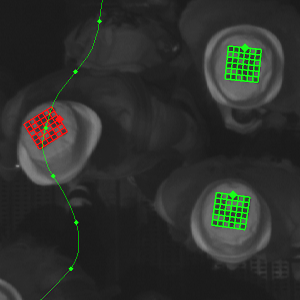
Multi-band Hough Forests for Detecting Humans with Reflective Safety Clothing from Mobile Machinery
We address the problem of human detection from heavy mobile machinery and robotic equipment operating at industrial working sites. Exploiting the fact that workers are typically obliged to wear high-visibility clothing with reflective markers, we propose a new recognition algorithm that specifically incorporates the highly discriminative features of the safety garments in the detection process. Termed Multi-band Hough Forest, our detector fuses the input from active near-infrared (NIR) and RGB color vision to learn a human appearance model that not only allows us to detect and localize industrial workers, but also to estimate their body orientation. We further propose an efficient pipeline for automated generation of training data with high-quality body part annotations that are used in training to increase detector performance. We report a thorough experimental evaluation on challenging image sequences from a real-world production environment, where persons appear in a variety of upright and non-upright body positions.
Fixing WTFs: Detecting Image Matches caused by Watermarks, Timestamps, and Frames in Internet Photos
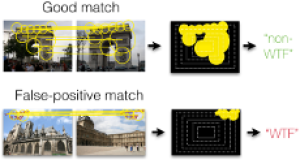
An increasing number of photos in Internet photo collections comes with watermarks, timestamps, or frames (in the following called WTFs) embedded in the image content. In image retrieval, such WTFs often cause false-positive matches. In image clustering, these false-positive matches can cause clusters of different buildings to be joined into one. This harms applications like landmark recognition or large-scale structure-from-motion, which rely on clean building clusters. We propose a simple, but highly effective detector for such false-positive matches. Given a matching image pair with an estimated homography, we first determine similar regions in both images. Exploiting the fact that WTFs typically appear near the border, we build a spatial histogram of the similar regions and apply a binary classifier to decide whether the match is due to a WTF. Based on a large-scale dataset of WTFs we collected from Internet photo collections, we show that our approach is general enough to recognize a large variety of watermarks, timestamps, and frames, and that it is efficient enough for largescale applications. In addition, we show that our method fixes the problems that WTFs cause in image clustering applications. The source code is publicly available and easy to integrate into existing retrieval and clustering systems.
Person Attribute Recognition with a Jointly-trained Holistic CNN Model

This paper addresses the problem of human visual attribute recognition, i.e., the prediction of a fixed set of semantic attributes given an image of a person. Previous work often considered the different attributes independently from each other, without taking advantage of possible dependencies between them. In contrast, we propose a method to jointly train a CNN model for all attributes that can take advantage of those dependencies, considering as input only the image without additional external pose, part or context information. We report detailed experiments examining the contribution of individual aspects, which yields beneficial insights for other researchers. Our holistic CNN achieves superior performance on two publicly available attribute datasets improving on methods that additionally rely on pose-alignment or context. To support further evaluations, we present a novel dataset, based on realistic outdoor video sequences, that contains more than 27,000 pedestrians annotated with 10 attributes. Finally, we explore design options to embrace the N/A labels inherently present in this task.
@InProceedings{PARSE27k,
author = {Patrick Sudowe and Hannah Spitzer and Bastian Leibe},
title = {{Person Attribute Recognition with a Jointly-trained Holistic CNN Model}},
booktitle = {ICCV'15 ChaLearn Looking at People Workshop},
year = {2015},
}
A Semantic Occlusion Model for Human Pose Estimation from a Single Depth image
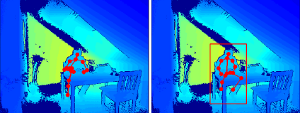
Human pose estimation from depth data has made significant progress in recent years and commercial sensors estimate human poses in real-time. However, state-of-theart methods fail in many situations when the humans are partially occluded by objects. In this work, we introduce a semantic occlusion model that is incorporated into a regression forest approach for human pose estimation from depth data. The approach exploits the context information of occluding objects like a table to predict the locations of occluded joints. In our experiments on synthetic and real data, we show that our occlusion model increases the joint estimation accuracy and outperforms the commercial Kinect 2 SDK for occluded joints.
Sequence-Level Object Candidates Based on Saliency for Generic Object Recognition on Mobile Systems

In this paper, we propose a novel approach for generating generic object candidates for object discovery and recognition in continuous monocular video. Such candidates have recently become a popular alternative to exhaustive window-based search as basis for classification. Contrary to previous approaches, we address the candidate generation problem at the level of entire video sequences instead of at the single image level. We propose a processing pipeline that starts from individual region candidates and tracks them over time. This enables us to group candidates for similar objects and to automatically filter out inconsistent regions. For generating the per-frame candidates, we introduce a novel multi-scale saliency approach that achieves a higher per-frame recall with fewer candidates than current state-of-the-art methods. Taken together, those two components result in a significant reduction of the number of object candidates compared to frame level methods, while keeping a consistently high recall.
Robust Marker-Based Tracking for Measuring Crowd Dynamics
We present a system to conduct laboratory experiments with thousands of pedestrians. Each participant is equipped with an individual marker to enable us to perform precise tracking and identification. We propose a novel rotation invariant marker design which guarantees a minimal Hamming distance between all used codes. This increases the robustness of pedestrian identification. We present an algorithm to detect these markers, and to track them through a camera network. With our system we are able to capture the movement of the participants in great detail, resulting in precise trajectories for thousands of pedestrians. The acquired data is of great interest in the field of pedestrian dynamics. It can also potentially help to improve multi-target tracking approaches, by allowing better insights into the behaviour of crowds.
SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports

We present an ample description of a socially compliant mobile robotic platform, which is developed in the EU-funded project SPENCER. The purpose of this robot is to assist, inform and guide passengers in large and busy airports. One particular aim is to bring travellers of connecting flights conveniently and efficiently from their arrival gate to the passport control. The uniqueness of the project stems from the strong demand of service robots for this application with a large potential impact for the aviation industry on one side, and on the other side from the scientific advancements in social robotics, brought forward and achieved in SPENCER. The main contributions of SPENCER are novel methods to perceive, learn, and model human social behavior and to use this knowledge to plan appropriate actions in real- time for mobile platforms. In this paper, we describe how the project advances the fields of detection and tracking of individuals and groups, recognition of human social relations and activities, normative human behavior learning, socially-aware task and motion planning, learning socially annotated maps, and conducting empir- ical experiments to assess socio-psychological effects of normative robot behaviors.
@article{triebel2015spencer,
title={SPENCER: a socially aware service robot for passenger guidance and help in busy airports},
author={Triebel, Rudolph and Arras, Kai and Alami, Rachid and Beyer, Lucas and Breuers, Stefan and Chatila, Raja and Chetouani, Mohamed and Cremers, Daniel and Evers, Vanessa and Fiore, Michelangelo and Hung, Hayley and Islas Ramírez, Omar A. and Joosse, Michiel and Khambhaita, Harmish and Kucner, Tomasz and Leibe, Bastian and Lilienthal, Achim J. and Linder, Timm and Lohse, Manja and Magnusson, Martin and Okal, Billy and Palmieri, Luigi and Rafi, Umer and Rooij, Marieke van and Zhang, Lu},
journal={Field and Service Robotics (FSR)
year={2015},
publisher={University of Toronto}
}
Previous Year (2014)
