
Publications
Motion Estimating Device

A motion estimating device first detects mobile objects Oi and Oi' in continuous image frames T and T', and acquires image areas Ri and Ri' corresponding to the mobile objects Oi and Oi'. Then, the motion estimating device removes the image areas Ri and Ri' corresponding to the mobile objects Oi and Oi' in the image frames T and T', extracts corresponding point pairs Pj of feature points between the image frames T and T' from the image areas having removed the image areas Ri and Ri', and carries out the motion estimation of the autonomous mobile machine between the image frames T and T' on the basis of the positional relationship of the corresponding point pairs Pj of feature points.
@misc{ess2012motion,
title={Motion estimating device},
author={Ess, A. and Leibe, B. and Schindler, K. and Van Gool, L. and Kitahama, K. and Funayama, R.},
url={http://www.google.com/patents/US8213684},
year={2012},
publisher={Google Patents},
note={US Patent 8,213,684}
}
Object Detection and Tracking for Autonomous Navigation in Dynamic Environments
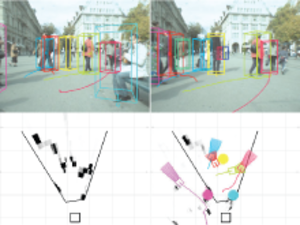
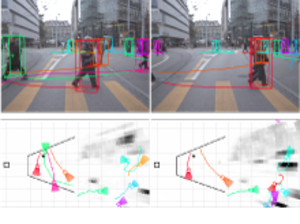
We address the problem of vision-based navigation in busy inner-city locations, using a stereo rig mounted on a mobile platform. In this scenario semantic information becomes important: rather than mod- elling moving objects as arbitrary obstacles, they should be categorised and tracked in order to predict their future behaviour. To this end, we combine classical geometric world mapping with object category detection and tracking. Object-category specific detectors serve to find instances of the most important object classes (in our case pedestrians and cars). Based on these detections, multi-object tracking recovers the objects’ trajectories, thereby making it possible to predict their future locations, and to employ dynamic path planning. The approach is evaluated on challenging, realistic video sequences recorded at busy inner-city locations.
@article{ess2010object,
title={Object detection and tracking for autonomous navigation in dynamic environments},
author={Ess, Andreas and Schindler, Konrad and Leibe, Bastian and Van Gool, Luc},
journal={The International Journal of Robotics Research},
volume={29},
number={14},
pages={1707--1725},
year={2010},
}
Multi-Person Tracking with Sparse Detection and Continuous Segmentation
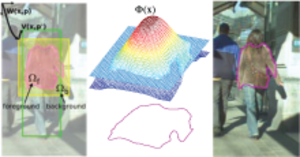
This paper presents an integrated framework for mobile street-level tracking of multiple persons. In contrast to classic tracking-by-detection approa- ches, our framework employs an efficient level-set tracker in order to follow indi- vidual pedestrians over time. This low-level tracker is initialized and periodically updated by a pedestrian detector and is kept robust through a series of consis- tency checks. In order to cope with drift and to bridge occlusions, the resulting tracklet outputs are fed to a high-level multi-hypothesis tracker, which performs longer-term data association. This design has the advantage of simplifying short- term data association, resulting in higher-quality tracks that can be maintained even in situations where the pedestrian detector does no longer yield good de- tections. In addition, it requires the pedestrian detector to be active only part of the time, resulting in computational savings. We quantitatively evaluate our ap- proach on several challenging sequences and show that it achieves state-of-the-art performance.
@incollection{mitzel2010multi,
title={Multi-person tracking with sparse detection and continuous segmentation},
author={Mitzel, Dennis and Horbert, Esther and Ess, Andreas and Leibe, Bastian},
booktitle={ECCV},
pages={397--410},
year={2010},
}
Geometrically Constrained Level-Set Tracking for Automotive Applications
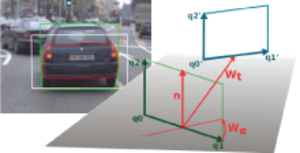
We propose a new approach for integrating geometric scene knowledge into a level-set tracking framework. Our approach is based on a novel constrained-homography transformation model that restricts the deformation space to physically plausible rigid motion on the ground plane. This model is especially suitable for tracking vehicles in automo- tive scenarios. Apart from reducing the number of parameters in the estimation, the 3D transformation model allows us to obtain additional information about the tracked objects and to recover their detailed 3D motion and orientation at every time step. We demonstrate how this in- formation can be used to improve a Kalman filter estimate of the tracked vehicle dynamics in a higher-level tracker, leading to more accurate ob- ject trajectories. We show the feasibility of this approach for an applica- tion of tracking cars in an inner-city scenario.
@incollection{horbert2010geometrically,
title={Geometrically constrained level set tracking for automotive applications},
author={Horbert, Esther and Mitzel, Dennis and Leibe, Bastian},
booktitle={Pattern Recognition},
pages={472--482},
year={2010},
}
An Evaluation of Two Automatic Landmark Building Discovery Algorithms for City Reconstruction
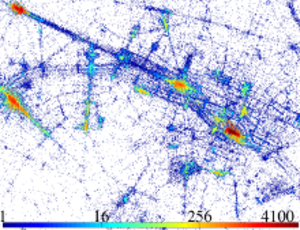
An important part of large-scale city reconstruction systems is an im- age clustering algorithm that divides a set of images into groups that should cover only one building each. Those groups then serve as input for structure from mo- tion systems. A variety of approaches for this mining step have been proposed recently, but there is a lack of comparative evaluations and realistic benchmarks. In this work, we want to fill this gap by comparing two state-of-the-art landmark mining algorithms: spectral clustering and min-hash. Furthermore, we introduce a new large-scale dataset for the evaluation of landmark mining algorithms con- sisting of 500k images from the inner city of Paris. We evaluate both algorithms on the well-known Oxford dataset and our Paris dataset and give a detailed com- parison of the clustering quality and computation time of the algorithms.
@incollection{weyand2010evaluation,
title={An evaluation of two automatic landmark building discovery algorithms for city reconstruction},
author={Weyand, Tobias and Hosang, Jan and Leibe, Bastian},
booktitle={ECCV Workshop},
pages={310--323},
year={2010},
}
Incremental Model Selection for Detection and Tracking of Planar Surfaces

Man-made environments are abundant with planar surfaces which have attractive properties and are a prerequisite for a variety of vision tasks. This paper presents an incremental model selection method to detect piecewise planar surfaces, where planes once detected are tracked and serve as priors in subsequent images. The novelty of this approach is to formalize model selection for plane detection with Minimal Description Length (MDL) in an incremental manner. In each iteration tracked planes and new planes computed from randomly sampled interest points are evaluated, the hypotheses which best explain the scene are retained, and their supporting points are marked so that in the next iteration random sampling is guided to unexplained points. Hence, the remaining finer scene details can be represented. We show in a quantitative evaluation that this new method competes with state of the art algorithms while it is more flexible to incorporate prior knowledge from tracking.
@inproceedings{prankl10incremental,
title = {Incremental Model Selection for Detection and Tracking of Planar Surfaces},
author = {Prankl, Johann and Zillich, Michael and Leibe, Bastian and Vincze, Markus},
year = {2010},
booktitle = {BMVC},
}
Automatic Detection and Tracking of Pedestrians from a Moving Stereo Rig
We report on a stereo system for 3D detection and tracking of pedestrians in urban traffic scenes. The system is built around a probabilistic environment model which fuses evidence from dense 3D reconstruction and image-based pedestrian detection into a consistent interpretation of the observed scene, and a multi-hypothesis tracker to reconstruct the pedestrians’ trajectories in 3D coordinates over time. Experiments on real stereo sequences recorded in busy inner-city scenarios are presented, in which the system achieves promising results.
@article{schindler2010automatic,
title={Automatic detection and tracking of pedestrians from a moving stereo rig},
author={Schindler, Konrad and Ess, Andreas and Leibe, Bastian and Van Gool, Luc},
journal={ISPRS Journal of Photogrammetry and Remote Sensing},
volume={65},
number={6},
pages={523--537},
year={2010},
}
Previous Year (2009)
