
Object Detection and Tracking for Autonomous Navigation in Dynamic Environments
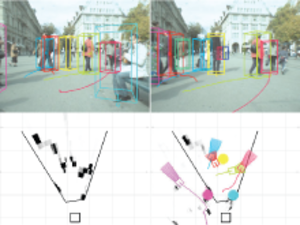
We address the problem of vision-based navigation in busy inner-city locations, using a stereo rig mounted on a mobile platform. In this scenario semantic information becomes important: rather than mod- elling moving objects as arbitrary obstacles, they should be categorised and tracked in order to predict their future behaviour. To this end, we combine classical geometric world mapping with object category detection and tracking. Object-category specific detectors serve to find instances of the most important object classes (in our case pedestrians and cars). Based on these detections, multi-object tracking recovers the objects’ trajectories, thereby making it possible to predict their future locations, and to employ dynamic path planning. The approach is evaluated on challenging, realistic video sequences recorded at busy inner-city locations.
@article{ess2010object,
title={Object detection and tracking for autonomous navigation in dynamic environments},
author={Ess, Andreas and Schindler, Konrad and Leibe, Bastian and Van Gool, Luc},
journal={The International Journal of Robotics Research},
volume={29},
number={14},
pages={1707--1725},
year={2010},
}
