
Publications
Robust Object Detection with Interleaved Categorization and Segmentation
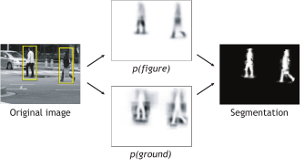
This paper presents a novel method for detecting and localizing objects of a visual category in cluttered real-world scenes. Our approach considers object categorization and figure-ground segmentation as two interleaved processes that closely collaborate towards a common goal. As shown in our work, the tight coupling between those two processes allows them to benefit from each other and improve the combined performance. The core part of our approach is a highly flexible learned representation for object shape that can combine the information observed on different training examples in a probabilistic extension of the Generalized Hough Transform. The resulting approach can detect categorical objects in novel images and automatically infer a probabilistic segmentation from the recognition result. This segmentation is then in turn used to again improve recognition by allowing the system to focus its efforts on object pixels and to discard misleading influences from the background. Moreover, the information from where in the image a hypothesis draws its support is employed in an MDL based hypothesis verification stage to resolve ambiguities between overlapping hypotheses and factor out the effects of partial occlusion. An extensive evaluation on several large data sets shows that the proposed system is applicable to a range of different object categories, including both rigid and articulated objects. In addition, its flexible representation allows it to achieve competitive object detection performance already from training sets that are between one and two orders of magnitude smaller than those used in comparable systems.
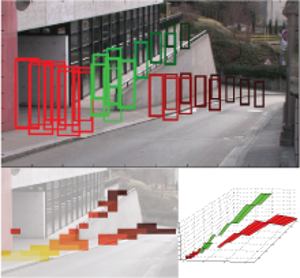
3D Urban Scene Modeling Integrating Recognition and Reconstruction

Supplying realistically textured 3D city models at ground level promises to be useful for pre-visualizing upcoming traffic situations in car navigation systems. Because this previsualization can be rendered from the expected future viewpoints of the driver, the required maneuver will be more easily understandable. 3D city models can be reconstructed from the imagery recorded by surveying vehicles. The vastness of image material gathered by these vehicles, however, puts extreme demands on vision algorithms to ensure their practical usability. Algorithms need to be as fast as possible and should result in compact, memory efficient 3D city models for future ease of distribution and visualization. For the considered application, these are not contradictory demands. Simplified geometry assumptions can speed up vision algorithms while automatically guaranteeing compact geometry models. In this paper, we present a novel city modeling framework which builds upon this philosophy to create 3D content at high speed. Objects in the environment, such as cars and pedestrians, may however disturb the reconstruction, as they violate the simplified geometry assumptions, leading to visually unpleasant artifacts and degrading the visual realism of the resulting 3D city model. Unfortunately, such objects are prevalent in urban scenes. We therefore extend the reconstruction framework by integrating it with an object recognition module that automatically detects cars in the input video streams and localizes them in 3D. The two components of our system are tightly integrated and benefit from each other’s continuous input. 3D reconstruction delivers geometric scene context, which greatly helps improve detection precision. The detected car locations, on the other hand, are used to instantiate virtual placeholder models which augment the visual realism of the reconstructed city model.
Using Recognition to Guide a Robot’s Attention

In the transition from industrial to service robotics, robots will have to deal with increasingly unpredictable and variable environments. We present a system that is able to recognize objects of a certain class in an image and to identify their parts for potential interactions. This is demonstrated for object instances that have never been observed during training, and under partial occlusion and against cluttered backgrounds. Our approach builds on the Implicit Shape Model of Leibe and Schiele, and extends it to couple recognition to the provision of meta-data useful for a task. Meta-data can for example consist of part labels or depth estimates. We present experimental results on wheelchairs and cars.
Measuring camera translation by the dominant apical angle
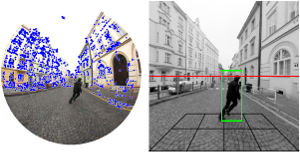
This paper provides a technique for measuring camera translation relatively w.r.t. the scene from two images. We demonstrate that the amount of the translation can be reliably measured for general as well as planar scenes by the most frequent apical angle, the angle under which the camera centers are seen from the perspective of the reconstructed scene points. Simulated experiments show that the dominant apical angle is a linear function of the length of the true camera translation. In a real experiment, we demonstrate that by skipping image pairs with too small motion, we can reliably initialize structure from motion, compute accurate camera trajectory in order to rectify images and use the ground plane constraint in recognition of pedestrians in a hand-held video sequence.
Accurate and Robust Registration for In-hand Modeling
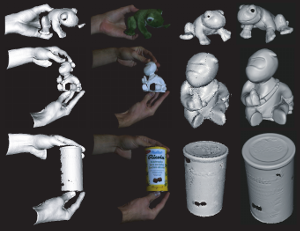
We present fast 3D surface registration methods for inhand modeling. This allows users to scan complete objects swiftly by simply turning them around in front of the scanner. The paper makes two main contributions. First, we propose an efficient method for detecting registration failures, which is a vital property of any automatic modeling system. Our method is based on two different consistency tests, one based on geometry and one based on texture. Second, we extend ICP by three additional fast registration methods for both coarse and fine alignment based on both texture and geometry. Each of those methods brings in additional information that can compensate for ambiguities in the other cues. Together, they allow for the robust reconstruction of a large variety of objects with different geometric and photometric properties. Finally, we show how both failure detection and fast registration can be combined in a practical and robust in-hand modeling system that operates at interactive frame rates.
A Mobile Vision System for Robust Multi-Person Tracking
We present a mobile vision system for multi-person tracking in busy environments. Specifically, the system integrates continuous visual odometry computation with tracking-by-detection in order to track pedestrians in spite of frequent occlusions and egomotion of the camera rig. To achieve reliable performance under real-world conditions, it has long been advocated to extract and combine as much visual information as possible. We propose a way to closely integrate the vision modules for visual odometry, pedestrian detection, depth estimation, and tracking. The integration naturally leads to several cognitive feedback loops between the modules. Among others, we propose a novel feedback connection from the object detector to visual odometry which utilizes the semantic knowledge of detection to stabilize localization. Feedback loops always carry the danger that erroneous feedback from one module is amplified and causes the entire system to become instable. We therefore incorporate automatic failure detection and recovery, allowing the system to continue when a module becomes unreliable. The approach is experimentally evaluated on several long and difficult video sequences from busy inner-city locations. Our results show that the proposed integration makes it possible to deliver stable tracking performance in scenes of previously infeasible complexity.
World-scale Mining of Objects and Events from Community Photo Collections

In this paper, we describe an approach for mining images of objects (such as touristic sights) from community photo col- lections in an unsupervised fashion. Our approach relies on retrieving geotagged photos from those web-sites using a grid of geospatial tiles. The downloaded photos are clustered into potentially interesting entities through a processing pipeline of several modalities, including visual, textual and spatial proximity. The resulting clusters are analyzed and are automatically classified into objects and events. Using mining techniques, we then find text labels for these clusters, which are used to again assign each cluster to a corresponding Wikipedia article in a fully unsupervised manner. A final ver- ification step uses the contents (including images) from the selected Wikipedia article to verify the cluster-article assignment. We demonstrate this approach on several urban areas, densely covering an area of over 700 square kilometers and mining over 200,000 photos, making it probably the largest experiment of its kind to date.
Probabilistic Parameter Selection for Learning Scene Structure from Video
We present an online learning approach for robustly combining unreliable observations from a pedestrian detector to estimate the rough 3D scene geometry from video sequences of a static camera. Our approach is based on an entropy modelling framework, which allows to simultaneously adapt the detector parameters, such that the expected information gain about the scene structure is maximised. As a result, our approach automatically restricts the detector scale range for each image region as the estimation results become more confident, thus improving detector run-time and limiting false positives.
Coupled Object Detection and Tracking from Static Cameras and Moving Vehicles
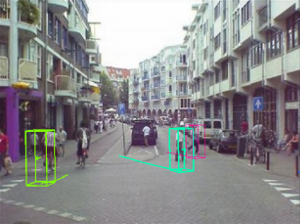
We present a novel approach for multi-object tracking which considers object detection and spacetime trajectory estimation as a coupled optimization problem. Our approach is formulated in a Minimum Description Length hypothesis selection framework, which allows our system to recover from mismatches and temporarily lost tracks. Building upon a state-of-the-art object detector, it performs multi-view/multi-category object recognition to detect cars and pedestrians in the input images. The 2D object detections are checked for their consistency with (automatically estimated) scene geometry and are converted to 3D observations, which are accumulated in a world coordinate frame. A subsequent trajectory estimation module analyzes the resulting 3D observations to find physically plausible spacetime trajectories. Tracking is achieved by performing model selection after every frame. At each time instant, our approach searches for the globally optimal set of spacetime trajectories which provides the best explanation for the current image and for all evidence collected so far, while satisfying the constraints that no two objects may occupy the same physical space, nor explain the same image pixels at any point in time. Successful trajectory hypotheses are then fed back to guide object detection in future frames. The optimization procedure is kept efficient through incremental computation and conservative hypothesis pruning. We evaluate our approach on several challenging video sequences and demonstrate its performance on both a surveillance-type scenario and a scenario where the input videos are taken from inside a moving vehicle passing through crowded city areas.
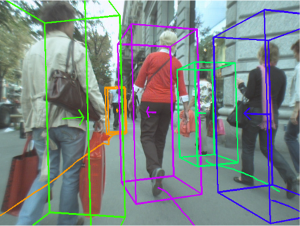
Articulated Multi-Body Tracking Under Egomotion
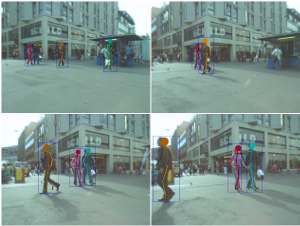
In this paper, we address the problem of 3D articulated multi-person tracking in busy street scenes from a moving, human-level observer. In order to handle the complexity of multi-person interactions, we propose to pursue a two-stage strategy. A multi-body detection-based tracker first analyzes the scene and recovers individual pedestrian trajectories, bridging sensor gaps and resolving temporary occlusions. A specialized articulated tracker is then applied to each recovered pedestrian trajectory in parallel to estimate the tracked person's precise body pose over time. This articulated tracker is implemented in a Gaussian Process framework and operates on global pedestrian silhouettes using a learned statistical representation of human body dynamics. We interface the two tracking levels through a guided segmentation stage, which combines traditional bottom-up cues with top-down information from a human detector and the articulated tracker's shape prediction. We show the proposed approach's viability and demonstrate its performance for articulated multi-person tracking on several challenging video sequences of a busy inner-city scenario.
Previous Year (2007)
