
Publications
Pedestrian Detection in Crowded Scenes
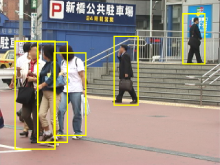
In this paper, we address the problem of detecting pedestrians in crowded real-world scenes with severe overlaps. Our basic premise is that this problem is too difficult for any type of model or feature alone. Instead, we present a novel algorithm that integrates evidence in multiple iterations and from different sources. The core part of our method is the combination of local and global cues via a probabilistic top-down segmentation. Altogether, this approach allows to examine and compare object hypotheses with high precision down to the pixel level. Qualitative and quantitative results on a large data set confirm that our method is able to reliably detect pedestrians in crowded scenes, even when they overlap and partially occlude each other. In addition, the flexible nature of our approach allows it to operate on very small training sets.
An Evaluation of Local Shape-Based Features for Pedestrian Detection
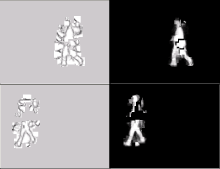
Pedestrian detection in real world scenes is a challenging problem. In recent years a variety of approaches have been proposed, and impressive results have been reported on a variety of databases. This paper systematically evaluates (1) various local shape descriptors, namely Shape Context and Local Chamfer descriptor and (2) four different interest point detectors for the detection of pedestrians. Those results are compared to the standard global Chamfer matching approach. A main result of the paper is that Shape Context trained on real edge images rather than on clean pedestrian silhouettes combined with the Hessian-Laplace detector outperforms all other tested approaches.
Local Features for Object Class Recognition

In this paper we compare the performance of local detectors and descriptors in the context of object class recognition. Recently, many detectors / descriptors have been evaluated in the context of matching as well as invariance to viewpoint changes [20]. However, it is unclear if these results can be generalized to categorization problems, which require different properties of features. We evaluate 5 stateof-the-art scale invariant region detectors and 5 descriptors. Local features are computed for 20 object classes and clustered using hierarchical agglomerative clustering. We measure the quality of appearance clusters and location distributions using entropy as well as precision. We also measure how the clusters generalize from training set to novel test data. Our results indicate that extended SIFT descriptors [22] computed on Hessian-Laplace [20] regions perform best. Second score is obtained by Salient regions [11]. The results also show that these two detectors provide complementary features. The new detectors/descriptors significantly improve the performance of a state-of-the art recognition approach [16] in pedestrian detection task.
Integrating Representative and Discriminant Models for Object Category Detection
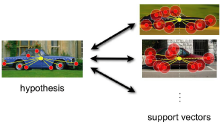
Category detection is a lively area of research. While categorization algorithms tend to agree in using local descriptors, they differ in the choice of the classifier, with some using generative models and others discriminative approaches. This paper presents a method for object category detection which integrates a generative model with a discriminative classifier. For each object category, we generate an appearance codebook, which becomes a common vocabulary for the generative and discriminative methods. Given a query image, the generative part of the algorithm finds a set of hypotheses and estimates their support in location and scale. Then, the discriminative part verifies each hypothesis on the same codebook activations. The new algorithm exploits the strengths of both original methods, minimizing their weaknesses. Experiments on several databases show that our new approach performs better than its building blocks taken separately. Moreover, experiments on two challenging multi-scale databases show that our new algorithm outperforms previously reported results.
Snakes on triangle meshes
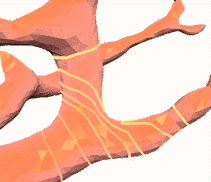
In this work we introduce a new method for representing and evolving snakes that are constrained to lie on a prescribed surface (triangle mesh). The new representation allows to automatically adapt the snake resolution to the surface tesselation and does not need any (unstable) back-projection operations. Furthermore, it enables efficient and robust collision detection and gives us complete control on the topological behaviour of the snakes, i.e. snakes may split or merge depending on the intended task. Possible applications include enhanced mesh scissoring operations and the detection of constrictions of a surface.
Previous Year (2004)
