
An Evaluation of Local Shape-Based Features for Pedestrian Detection
British Machine Vision Conference (BMVC'05)
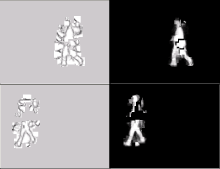
Pedestrian detection in real world scenes is a challenging problem. In recent years a variety of approaches have been proposed, and impressive results have been reported on a variety of databases. This paper systematically evaluates (1) various local shape descriptors, namely Shape Context and Local Chamfer descriptor and (2) four different interest point detectors for the detection of pedestrians. Those results are compared to the standard global Chamfer matching approach. A main result of the paper is that Shape Context trained on real edge images rather than on clean pedestrian silhouettes combined with the Hessian-Laplace detector outperforms all other tested approaches.
