
Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing
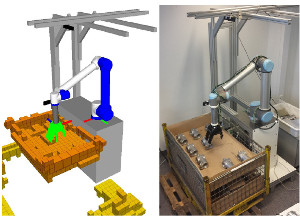
Depalletizing is a challenging task for manipulation robots. Key to successful application are not only robustness of the approach, but also achievable cycle times in order to keep up with the rest of the process. In this paper, we propose a system for depalletizing and a complete pipeline for detecting and localizing objects as well as verifying that the found object does not deviate from the known object model, e.g., if it is not the object to pick. In order to achieve high robustness (e.g., with respect to different lighting conditions) and generality with respect to the objects to pick, our approach is based on multi-resolution surfel models. All components (both software and hardware) allow operation at high frame rates and, thus, allow for low cycle times. In experiments, we demonstrate depalletizing of automotive and other prefabricated parts with both high reliability (w.r.t. success rates) and efficiency (w.r.t. low cycle times).
@string{iros="International Conference on Intelligent Robots and Systems (IROS)"}
@inproceedings{holz2015_depalette,
author = {D. Holz and A. Topalidou-Kyniazopoulou and J. Stueckler and S. Behnke},
title = {Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing},
booktitle = iros,
year = 2015,
}
