
Depth and Appearance for Mobile Scene Analysis
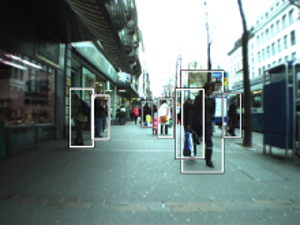
In this paper, we address the challenging problem of simultaneous pedestrian detection and ground-plane estimation from video while walking through a busy pedestrian zone. Our proposed system integrates robust stereo depth cues, ground-plane estimation, and appearance-based object detection in a principled fashion using a graphical model. Object-object occlusions lead to complex interactions in this model that make an exact solution computationally intractable. We therefore propose a novel iterative approach that first infers scene geometry using Belief Propagation and then resolves interactions between objects using a global optimization procedure. This approach leads to a robust solution in few iterations, while allowing object detection to benefit from geometry estimation and vice versa. We quantitatively evaluate the performance of our proposed approach on several challenging test sequences showing strolls through busy shopping streets. Comparisons to various baseline systems show that it outperforms both a system using no scene geometry and one just relying on Structure-from-Motion without dense stereo
@InProceedings{eth_biwi_00498,
author = {A. Ess and B. Leibe and L. Van Gool},
title = {Depth and Appearance for Mobile Scene Analysis},
booktitle = {International Conference on Computer Vision (ICCV'07)},
year = {2007},
month = {October},
keywords = {}
}
