
Moving Obstacle Detection in Highly Dynamic Scenes
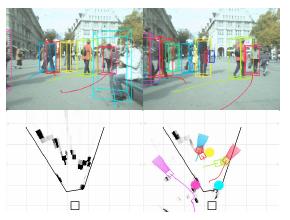
We address the problem of vision-based multi-person tracking in busy pedestrian zones using a stereo rig mounted on a mobile platform. Specifically, we are interested in the application of such a system for supporting path planning algorithms in the avoidance of dynamic obstacles. The complexity of the problem calls for an integrated solution, which extracts as much visual information as possible and combines it through cognitive feedback. We propose such an approach, which jointly estimates camera position, stereo depth, object detections, and trajectories based only on visual information. The interplay between these components is represented in a graphical model. For each frame, we first estimate the ground surface together with a set of object detections. Based on these results, we then address object interactions and estimate trajectories. Finally, we employ the tracking results to predict future motion for dynamic objects and fuse this information with a static occupancy map estimated from dense stereo. The approach is experimentally evaluated on several long and challenging video sequences from busy inner-city locations recorded with different mobile setups. The results show that the proposed integration makes stable tracking and motion prediction possible, and thereby enables path planning in complex and highly dynamic scenes.
