
From Monocular SLAM to Autonomous Drone Exploration
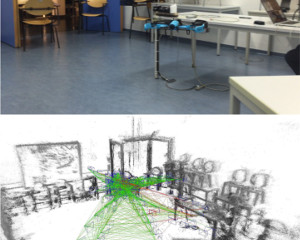
Micro aerial vehicles (MAVs) are strongly limited in their payload and power capacity. In order to implement autonomous navigation, algorithms are therefore desirable that use sensory equipment that is as small, low-weight, and low- power consuming as possible. In this paper, we propose a method for autonomous MAV navigation and exploration using a low-cost consumer-grade quadrocopter equipped with a monocular camera. Our vision-based navigation system builds on LSD-SLAM which estimates the MAV trajectory and a semi-dense reconstruction of the environment in real-time. Since LSD-SLAM only determines depth at high gradient pixels, texture-less areas are not directly observed. We propose an obstacle mapping and exploration approach that takes this property into account. In experiments, we demonstrate our vision-based autonomous navigation and exploration system with a commercially available Parrot Bebop MAV.
@inproceedings{stumberg2017_mavexplore,
author={Lukas von Stumberg and Vladyslav Usenko and Jakob Engel and J\"org St\"uckler and Daniel Cremers},
title={From Monoular {SLAM} to Autonomous Drone Exploration},
booktitle = {Accepted for the European Conference on Mobile Robots (ECMR)},
year = {2017},
}
