
OpenStreetSLAM: Global Vehicle Localization Using OpenStreetMaps
International Conference on Robotics and Automation (ICRA'13)
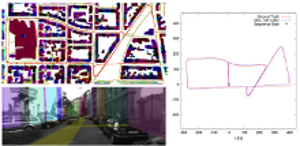
In this paper we propose an approach for global vehicle localization that combines visual odometry with map information from OpenStreetMaps to provide robust and accurate estimates for the vehicle’s position. The main contribution of this work comes from the incorporation of the map data as an additional cue into the observation model of a Monte Carlo Localization framework. The resulting approach is able to compensate for the drift that visual odometry accumulates over time, significantly improving localization quality. As our results indicate, the proposed approach outperforms current state-ofthe- art visual odometry approaches, indicating in parallel the potential that map data can bring to the global localization task.
